Propósito: Identifica los elementos básicos para la construcción de un prototipo.
ELEMENTOS INICIALES
1. Protoboard:
El protoboard es una placa de pruebas que permite interconectar elementos electrónicos sin la necesidad de soldar componentes. Logrando así que se facilite el armado de circuitos o sistemas electrónicos.
¿Para qué sirve el protoboard?
La placa de protoboard se emplea normalmente para realizar pruebas experimentales de circuitos electrónicos. Si la prueba es satisfactoria, el circuito se diseña en una placa de cobre y se solda para evitar el riesgo de que se desconecte cualquier componente. Si la prueba no es satisfactoria, es fácil cambiar las conexiones y reemplazar los componentes.
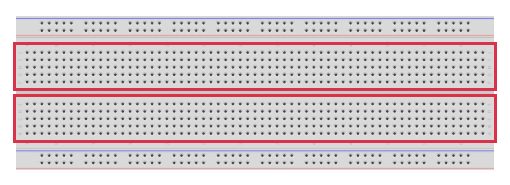
Las protoboards tienen tres partes fáciles de identificar: el canal central, las pistas, y los buses.
Canal central
El canal central está ubicado en la parte central de la lámina y está fabricado con un material aislante. Su función es separar las zonas de conexión superior e inferior de la placa, y así cuando se conecten circuitos integrados en la tabla protoboard, se mantengan aislados los pines de ambos lados de dicho circuito integrado.
Buses
Los buses se encuentran a los costados de la placa Protoboard, y generalmente se emplean para conectar la tierra del circuito y su voltajes de suministro. Los buses generalmente se indican con franjas negras o azules para marcar el bus de tierra, y franjas rojas para marcar el bus de voltaje positivo.
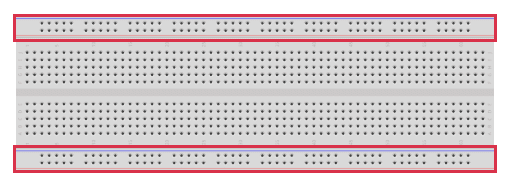
Estos buses o rieles de alimentación son tiras de metal que son idénticas a las que se ejecutan horizontalmente con las pistas, excepto que, por lo general, están todas conectadas. A continuación se muestra una imagen donde se aprecia la conexión de los buses.
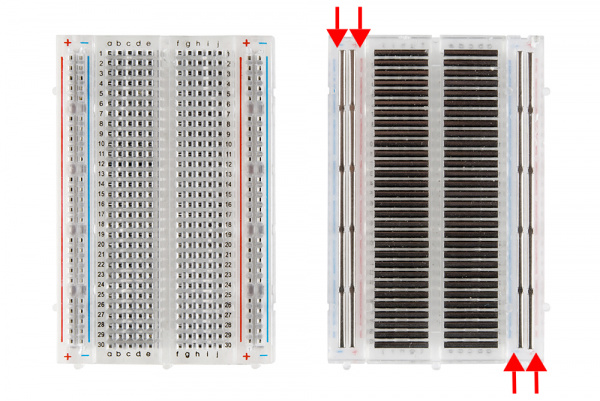
En la imagen siguiente se muestra una placa protoboard a la cual se le ha eliminado el respaldo adhesivo. Se pueden ver muchas filas horizontales de tiras de metal en la parte inferior del tablero.
2.Motores:
Es la parte sistemática de una máquina capaz de hacer funcionar el sistema, transformando algún tipo de energía, en energía mecánica capaz de realizar un trabajo. En los automóviles este efecto es una fuerza que produce el movimiento. Existen diversos tipos, siendo de los más comunes los siguientes:
El motor se puede identificar como una gran pieza de metal que está ubicada, generalmente, en la parte frontal del vehículo. Sus dimensiones varían, pero indudablemente se puede mirar como un entramado de conectores, válvulas, tubos y tuercas que le dan contundencia al entramado mecánico.Todos los robot incluyen algún sistema capaz de producir movimiento siendo los mas corrientes los motores de corriente continua (DC) y los servos motores o servos. Los primeros se utilizan casi siempre junto con un sistema de engranajes que reducen la velocidad y proporcionan mayor fuerza.
Entre las partes del motor de un auto se encuentran:
- Cilindros: pueden ser 1, 2, 4, 6, 8 o 16 piezas metálicas fundida
- Es en bloque, el que además se ve complementado por conductos de agua de refrigeración y aceite de lubricación. La cantidad de cilindros refleja el potencial que puede llegar a tener un motor, así como el nivel de consumo de gasolina. Por lo general, los vehículos de uso común cuentan con cuatro cilindros. En cada uno de ellos se desarrolla la secuencia de cuatro tiempos del motor, que implica la transformación del combustible en fuerza mecánica necesaria para el desplazamiento del vehículo.
- Pistones: se encuentran al interior de los cilindros y cumplen una función de pared, ya que evitan la fuga de combustibles y gases durante el proceso de transformación de la materia. Se caracterizan por sus movimientos ascendentes y descendentes, generando una presión sobre los canales de entrada de elementos y salida de los gases producidos por el proceso de combustión. Los pistones están unidos a dos elementos: la biela (el brazo que soporta su movimiento) y el cigüeñal (manivela de contrapeso que produce un efecto circular de la biela y el pistón, facilitando su repetición, tal como los pedales de una bicicleta).
- Culatas: es la tapa superior de todo el conjunto de cilindros. Aquí se encuentran ubicadas algunas importantes partes del motor de un auto, como la válvula de admisión de aire y gasolina y la válvula de escape de gases (residuos de combustión). Ambas tienen sus respectivas compuertas de entrada y salida. También en la culata se encuentran las bujías, que cumplen un rol de “chispero”; y el árbol de levas, que es una pieza de hierro fundido que controla el movimiento de las válvulas a modo de temporizador.
- Cárter: cumple un rol de balde o bandeja en la parte de abajo del motor. Permite depositar el aceite utilizado para la lubricación de las piezas por medio de una red de distribución que envuelve el motor.
¿Cómo se complementan las partes?
El motor funciona con una secuencia de cuatro golpes o cuatro tiempos, que se expresan de la siguiente forma:
- Paso 1: Admisión. Se origina a partir de un movimiento descendente del pistón, ubicado al interior del cilindro. Este desplazamiento hacia abajo permite la apertura de la válvula que inyecta una cantidad determinada de combustible y aire.
- Paso 2: Compresión. Se realiza una vez que las puertas de las válvulas están cerradas y el pistón regresa con un movimiento ascendente. La presión al interior del cilindro permite una mixtura comprimida entre aire y combustible, en alta temperatura.
- Paso 3: Explosión, o golpe de poder. La mezcla generada anteriormente es un material necesario para que entre en juego la bujía, que cumple un rol de chispero. La explosión resultante hace que el pistón vuelva a bajar con una gran fuerza.
- Paso 4: Escape. Aquí el pistón vuelve a subir, y con la fuerza elimina la mezcla resultante a través de las válvulas de escape de gases.
Estos cuatro tiempos se repiten de forma continua mientras el vehículo está encendido, multiplicando el potencial al momento de la aceleración y permitiendo la fuerza necesaria para el desplazamiento del vehículo.
Este es un proceso que se va repitiendo por cilindro, que como ya hemos dicho, son cuatro en la mayoría de los automóviles. ¡Imagínate que se repite, de forma armónica, decenas de veces por segundo.
3. Cables: Un cable eléctrico tiene la finalidad de transportar la energía eléctrica de un punto a otro.En función de su aplicación final, los cables pueden tener diferentes configuraciones, basando siempre su diseño según normativas nacionales e internacionales. A continuación vamos a profundizar en las diferentes clasificaciones que se pueden realizar en torno a los cables eléctricos.
Tipos de cable eléctrico por su uso
Cables para paneles eléctricos:
Cables flexibles para cableado de cuadros eléctricos. Instalaciones fáciles y seguras. Cables eléctricos especialmente adecuados para uso doméstico, para instalación en locales de pública concurrencia, para derivaciones individuales y para cableado interno de armarios eléctricos, cajas de interruptores y pequeños aparatos eléctricos.
Cables de potencia:
Cables de energía para instalaciones industriales y locales de pública concurrencia. Es habitual encontrar cables de potencia en aplicaciones para derivaciones individuales, para la transmisión de potencia en todo tipo de conexiones de baja tensión, para uso industrial en condiciones exigentes y para variadores de frecuencia (VFD).
Cables armados:
Cables con armadura de aluminio o acero para instalaciones con riesgo de agresión mecánica. También es habitual encontrar cables armados en lugares con presencia de roedores, así como en instalaciones en locales con riesgo de incendio y explosión (ATEX).
Cables de goma:
La utilización de cables de goma extra flexibles es muy variada. Podemos encontrar cables de goma en instalaciones industriales fijas y también de servicio móvil. Los cables para soldadura es conveniente que tengan la cubierta de goma, lo que permite transmitir altas corrientes entre el generador de soldadura y el electrodo.
Cables libres de halogenos
Los Cables Libres de Halógenos de Alta Seguridad (AS) con baja emisión de humos y gases corrosivos en caso de incendio son adecuados para su uso en cableado de cuadros eléctricos y locales de pública concurrencia, instalaciones de todo tipo en locales públicos, derivaciones individuales, circuitos de emergencia, redes de distribución pública y también para servicio móvil.
Cables resistentes al incendio:
Estos cables están especialmente diseñados para transmitir energía eléctrica en las condiciones extremasque se presentan durante un incendio prolongado, garantizando el suministro a los equipos de emergencia como señalización, extractores de humos, alarmas acústicas, bombas de agua, etc. Se recomienda su uso en circuitos de emergencia en lugares de pública concurrencia.
Cables de control:
Los cables control para instalaciones fijas o móviles es conveniente que sean extremadamente flexibles, ya que principalmente su uso está diseñado para pequeños electrodomésticos, para la interconexión de partes de máquinas usadas para la fabricación, para sistemas de señalización y control, para conexión de motores o convertidores de frecuencia, para transmisión de señal donde el voltaje inducido por un campo electromagnético exterior pueda afectar a la señal transmitida o para las conexiones de suministro de potencia para evitar generar campos electromagnéticos.
Cables de instrumentación:
Se trata de cables flexibles y apantallados para la transmisión de señales entre equipos en instalaciones industriales. Especialmente indicados para la óptima transmisión de datos en entornos con un elevado nivel de interferencias electromagnéticas.
Cables solares:
Se trata de cables especialmente indicados para la conexión entre paneles fotovoltaicos, y desde los paneles al inversor de corriente continua a alterna. Gracias al diseño de sus materiales y a su cubierta especialmente resistente a la radiación solar, así como a las temperaturas extremas, pueden ser instalados a la intemperie en plenas garantías.
Cables especiales:
Existe una amplia variedad de cables eléctricos para instalaciones especiales como por ejemplo: instalaciones temporales de guirnaldas luminosas en ferias; conexiones de puentes grúa, montacargas, elevadores y ascensores; aplicaciones en bombas sumergidas y zonas de agua potable como acuarios, sistemas de depuración, fuentes de agua potable o en piscinas para sistemas de iluminación, depuración y limpieza.
Cables de aluminio:
Los cables de aluminio para la transmisión de potencia son aptos para su instalación fijas en interiores, exteriores y/o enterrados.
4. Bombillos leds:
¿Qué formas pueden tomar las bombillas LED?
La tecnología LED, basada en el ensamblaje de pequeños semiconductores, puede adoptar muchas formas. La tendencia actual es hacia bombillas vintage, con diodos producidos en forma de filamentos. Estas bombillas LED son una reminiscencia de las antiguas bombillas de filamento, y el vidrio a menudo se forma en varias formas o tamaños para convertirse en verdaderos elementos decorativos.

La tecnología LED también puede producir diferentes colores. Por lo tanto, hay bombillas que se venden con un mando a distancia, que le permite elegir el color de la iluminación.
 |

¿Qué tipos de iluminación con tecnología LED?
Además de las bombillas, existen nuevas formas de iluminación LED que sólo son posibles gracias a esta tecnología. Estas luces no contienen bombilla y, por lo tanto, tendrán que ser reemplazadas por completo una vez al final de su vida útil, pero su esperanza de vida se estima generalmente en 10 años con el uso convencional.
Los LEDs están disponibles en forma de tiras, que pueden instalarse debajo de un armario de cocina, por ejemplo, para iluminar la superficie de trabajo inferior. También encontrarás paneles planos, cuadrados, rectangulares o redondos, que se pueden instalar en el techo o en la pared, algunos de los cuales pueden superar el metro de longitud.
La tecnología LED, y la ausencia de una bombilla, permite a los diseñadores superar las limitaciones de las formas tradicionales y ofrecer, por ejemplo, lámparas de techo en forma de anillo.

5. Baterías o pilas:

1. Partes del interruptor de luz
Es útil comprender los tres componentes básicos del interruptor de la luz antes de abordar este proyecto.
Interruptor y placa
La primera de las partes de un interruptor de luz son los interrumptores y las placas que son las partes con las que todos lidian a diario.La placa actúa como la barrera artística, cubriendo el agujero en la pared. El interruptor es el dispositivo real que mueve hacia arriba y hacia abajo y controla si las luces están encendidas o apagadas.

Alambres
En las partes de un interruptor de luz, estos elementos son visibles después de quitar la placa. Estos cables manejan la transmisión al terminal para encender o apagar la luz según la posición del interruptor. La cantidad de cables depende de la ubicación del interruptor y si está en el centro o al final de los tipos de circuitos.

Otra cosa que debes saber sobre las partes de un interruptor de luz es que el número de cables depende de la ubicación del interruptor de la luz y de si está al final de un circuito o dentro del centro. Las partes de un interruptor de luz que están en el extremo generalmente tienen 3 cables: un cable verde, blanco y negro.
Los interruptores de circuito medio generalmente tienen dos conjuntos de cables para cada uno de estos colores. Los cables en esta circunstancia suelen estar conectados a terminales y, a menudo, también a conectores de cables. Recuerda siempre no reparar ni alterar los cables eléctricos sin asegurarte de que la alimentación esté apagada en la caja de fusibles.
Terminales
Los terminales producen una dirección para los cables, según lo gestionado por la posición del interruptor. Envía una señal eléctrica a los circuitos y luego a la fuente de luz o aparato.
Las conexiones sueltas al terminal provocan defectos y fallas eléctricas. El terminal con frecuencia presenta un dispositivo de plástico que puede girarse atando los cables para garantizar que se mantengan unidos de manera segura.

2. Componentes De Un Interruptor
Ahora que ya conocemos las partes de un interruptor de luz, veremos los componentes (cargas eléctricas) que le dan esencia y vida a los interruptores:

Cargas inductivas
Los interruptores para cargas inductivas deben estar clasificados para manejar estos casos. La chispa causará interferencia electromagnética si no se suprime; Una red amortiguadora de resistencia y condensador en serie apagará la chispa.
Cargas incandescentes
Un interruptor de pared “con clasificación T” (la T es para filamento de tungsteno) que es adecuado para cargas incandescentes.
Cuando se enciende, una lámpara incandescente consume una gran corriente de entrada de aproximadamente diez veces la corriente de estado estable; A medida que el filamento se calienta, su resistencia aumenta y la corriente disminuye a un valor de estado estable. Un interruptor diseñado para una carga de lámpara incandescente puede soportar esta corriente de entrada.
Corriente de humectación
La corriente de humectación es la corriente mínima que necesita fluir a través de un interruptor mecánico mientras se opera para romper cualquier película de oxidación que pueda haberse depositado en los contactos del interruptor.
7. Resistencias:La resistencia eléctrica es la oposición (dificultad) al paso de la corriente eléctrica. Sabemos que la corriente elctrica es el paso (movimiento) de electrones por un circuito o, a través de un elemento de un circuito (receptor). Según lo dicho podemos concluir que "la corriente eléctrica es un movimiento de electrones".
Dependiendo del tipo, material y sección (grosor) de cable o conductor por el que tengan que pasar los electrones, les costará más o menos trabajo. Un buen conductor casi no les ofrecerá resistencia a su paso por él, un aislante les ofrecerá tanta resistencia que los electrones no podrán pasar a través de él. Ese esfuerzo que tienen que vencer los electrones para circular, es precisamente la Resistencia Eléctrica. Luego lo veremos más detalladamente.
Estos electrones cuando llegan algún receptor, como por ejemplo una lámpara, para pasar a través de ella les cuesta más trabajo, es decir, también les ofrece resistencia a que pasen por el receptor, ya que la energía que llevan los electrones se transforma en otro tipo de energía en la lámpara (luminosa).
Podemos clasificar las resitencias en tres grandes grupos:
Resistencias fijas: Son las que presentan un valor óhmico que no podemos modificar.
Resistencias variables: Son las que presentan un valor óhmico que nosotros podemos variar modificando la posición de un contacto deslizante.
Resistencias especiales: Son las que varían su valor óhmico en función de la estimulación que reciben de un factor externo (luz, temperatura...)
En todas las resistencias nos podemos encontrar tres características, el valor nominal expresado en ómios (W), la tolerancia en % y la potencia en vatios (W).
Valor nominal: Es el que indica el fabricante. Este valor normalmente es diferente del valor real, pues influyen diferentes factores de tipo ambiental o de los mismos procesos de fabricación, pues no son exactos. Suele venir indicado, bien con un código de colores, bien con caracteres alfanuméricos.
Tolerancia: Debido a los factores indicados anteriormente, y en función de la exactitud que se le de al valor, se establece el concepto de tolerancia como un % del valor nominal. De esta forma, si nosotros sumamos el resultado de aplicar el porcentaje al valor nominal, obtenemos un valor límite superior. Si por el contrario lo que hacemos es restarlo, obtenemos un valor límite inferior. Con la toelrancia, el fabricante nos garantiza que el valor real de la resistencia va a estar siempre contenido entre estos valores, Si esto no es así, el componente está defectuoso.
Potencia nominal: Es el valor de la potencia disipada por el resistor en condiciones normales de presión y temperatura.
Nos podemos encontrar con dos símbolos, uno regulado por una norma americana y otro por una norma europea.



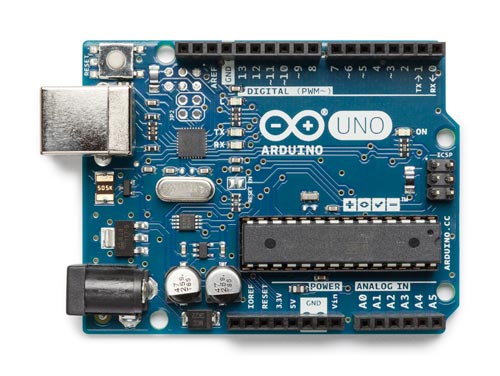
8. Arduino:Arduino es una plataforma de prototipos electrónica de código abierto (open-source) basada en una sencilla placa con entradas y salidas, en un entorno de desarrollo que está basado en el lenguaje de programación.Processing. Es un dispositivo que conecta el mundo físico con el mundo virtual, o el mundo analógico con el digital.
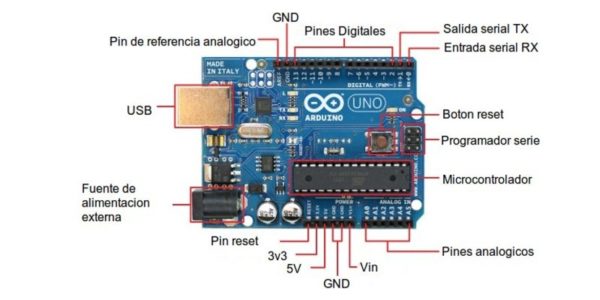
Partes de un arduino
El arduino como todo componente esta conformado distintas partes como son entradas, salidas, alimentación, comunicación y shields.
Entradas
Son los pines de nuestra placa que podemos utilizar para hacer lecturas. En la placa Uno son los pines digitales (del 0 al 13) y los analógicos (del A0 al A5).
Salidas
Los pines de salidas se utilizan para el envío de señales. En este caso los pines de salida son sólo los digitales (0 a 13).
Otros pines
También tenemos otros pines como los GND (tierra), 5V que proporciona 5 Voltios, 3.3V que proporciona 3.3 Voltios, los pines REF de referencia de voltaje, TX (transmisión) y RX (lectura) también usados para comunicación serial, RESET para resetear, Vin para alimentar la placa y los pines ICSP para comunicación SPI.
Alimentación
Como hemos visto el pin Vin sirve para alimentar la placa pero lo más normal es alimentarlo por el jack de alimentación usando una tensión de 7 a 12 Voltios. También podemos alimentarlo por el puerto USB pero en la mayoría de aplicaciones no lo tendremos conectado a un ordenador.
Comunicación
En nuestros tutoriales nos comunicaremos con Arduino mediante USB para cargar los programas o enviar/recibir datos. Sin embargo no es la única forma que tiene Arduino de comunicarse. Cuando insertamos una shield ésta se comunica con nuestra placa utilizando los pines ICSP (comunicación ISP), los pines 10 a 13 (también usados para comunicación ISP), los pines TX/RX o cualquiera de los digitales ya que son capaces de configurarse como pines de entrada o salida y recibir o enviar pulsos digitales.
Shields
Se llama así a las placas que se insertan sobre Arduino a modo de escudo ampliando sus posibilidades de uso. En el mercado existen infinidad de shields para cada tipo de Arduino. Algunas de las más comunes son las de Ethernet, Wi-Fi, Ultrasonidos, Pantallas LCD, relés, matrices LED’s, GPS.
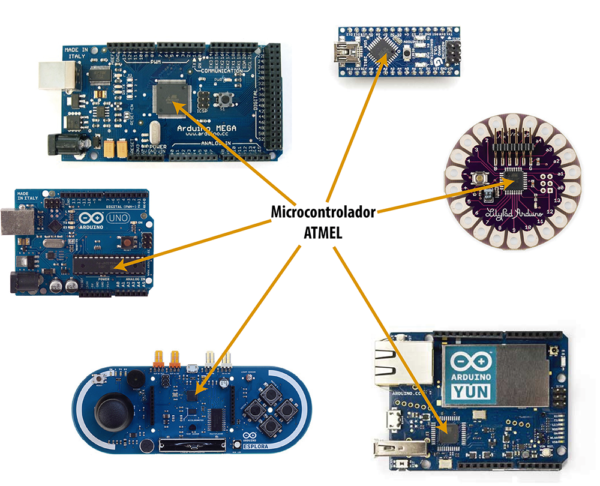
Arduino está constituido en el hardware por un micro controlador principal llamado Atmel AVR de 8 bits (que es programable con un lenguaje de alto nivel), presente en la mayoría de los modelos de Arduino
Las características generales de todas las placas Arduino son las siguientes:
- El microprocesador ATmega328
- 32 kbytes de memoria Flash
- 1 kbyte de memoria RAM
- 16 MHz
- 13 pins para entradas/salidas digitales (programables)
- 5 pins para entradas analógicas
- 6 pins para salidas analógicas (salidas PWM)
- Completamente autónomo: Una vez programado no necesita estar
- conectado al PC
- Microcontrolador ATmega328
- Voltaje de operación 5V
- Voltaje de entrada (recomendado) 7-12 V
- Voltaje de entrada (limite) 6-20 V
- Digital I/O Pins 14 (con 6 salidas PWM)
- Entradas analógicas Pins 6
- DC corriente I/O Pin 40 mA
- DC corriente 3.3V Pin 50 mA
- Memoria Flash 32 KB (2 KB para el bootloader)
- SRAM 1 KB
- EEPROM 512 byte
- Velocidad de reloj 16 MHz
¿Cómo funciona arduino?
El Arduino es una placa basada en un microcontrolador, específicamente un ATMEL. Un microcontrolador es un circuito integrado (podríamos hablar de un microhip) en el cual se pueden grabar instrucciones. Estas instrucciones se escriben utilizando un lenguaje de programación que permite al usuario crear programas que interactúan con circuitos electrónicos.
Normalmente un microcontrolador posee entradas y salidas digitales, entradas y salidas analógicas y entradas y salidas para protocolos de comunicación. Un Arduino es una placa que cuenta con todos los elementos necesarios para conectar periféricos a las entradas y salidas del microcontrolador. Se trata de una placa impresa con todos los componentes necesarios para el funcionamiento del micro y su comunicación con una computadora a través de comunicación serial.
La comunicación serial es un protocolo de comunicación que alguna vez fue muy utilizado a través de los puertos serie que traían las computadoras de antaño.
Existen diferentes modelos de Arduino, con múltiples características en cuanto a tamaño, formas, funciones y precios.
Por que usar arduino?
Hay muchos otros microcontroladores y plataformas microcontroladoras disponibles para computación física. Parallax Basic Stamp, Netmedia’s BX-24, Phidgets, MIT’s Handyboard, y muchas otras ofertas de funcionalidad similar. Todas estas herramientas toman los desordenados detalles de la programación de microcontrolador y la encierran en un paquete fácil de usar. Arduino también simplifica el proceso de trabajo con microcontroladores, pero ofrece algunas ventajas para profesores, estudiantes y a aficionados interesados sobre otros sistemas.
9. Sensores:
¿Qué es un sensor?
Antes de explicar los diferentes tipos de sensores que existen, vamos a ver en qué consiste un sensor. Seguramente es un concepto que te suene de la física, o incluso de la química. Pero, ¿qué es exactamente?
Un sensor es un dispositivo o un objeto que tiene la capacidad de captar diferentes estímulos del exterior, y de transformarlos mediante un transductor en energía eléctrica (impulso eléctrico). Es decir, transforma (o traduce) información o energía procedente del exterior en un impulso eléctrico (normalmente un impulso digital). Esta información exterior puede ser de cualquier tipo (fisica , química...).
Posteriormente, dichos impulsos se analizan, se procesan y se transforman, con la finalidad de generar una determinada respuesta. Podemos encontrar diferentes tipos de sensores, como veremos a continuación.
Tipos de sensores
Así, encontramos diferentes tipos de sensores, según el tipo de variable que deban medir o detectar. En este artículo te explicamos cuáles son los 12 tipos de sensores que podemos encontrar, cómo funcionan y algunos ejemplos de los mismos.
1. Sensor de temperatura
El sensor de temperatura nos proporciona información de la temperatura del exterior (es decir, del medio), mediante impulsos eléctricos. Estos sensores permiten controlar la temperatura de ambiente.
Los sensores de temperatura son en realidad resistencias, cuyo valor asciende con la temperatura, o disminuye con ella. En el primer caso, lo denominamos termistor PTC, y en el segundo, termistor NTC.
A su vez, los sensores de temperatura pueden ser de diferentes tipos: de contacto, de no-contacto, mecánicos y eléctricos. Un ejemplo de sensor de temperatura es un termómetro (el clásico, de mercurio) (en este caso, se trata de un sensor mecánico). Este tipo de sensores son especialmente utilizados en el sector industrial; su objetivo es controlar la temperatura de las diferentes máquinas, entre otros.
2. Sensores de luz
Otros tipos de sensores son los de la luz; en este caso, se trata de dispositivos electrónicos que responden al cambio en la intensidad de la luz.
Es decir, permiten determinar la presencia de luz. Así, este tipo de sensores detectan la luz visible (es decir, la que percibimos con el ojo), y además, responden en función de su intensidad.
Un ejemplo de sensor de luz es la célula fotoeléctrica, un dispositivo que transforma la energía lumínica en energía eléctrica, a través de un efecto denominado “efecto fotoeléctrico”. Este dispositivo permite generar energía solar fotovoltaica.
3. Sensores de distancia
Los sensores de distancia son dispositivos que permiten medir distancias; además, dependiendo del tipo, también pueden utilizarse como sensores de presencia o movimiento.
Un ejemplo de sensor de distancia es el infrarrojo, basado en un sistema de emisión y recepción de radiación. También encontramos, como ejemplo de sensor de distancia, el sensor ultrasónico, que envía pulsos haciendo que las ondas reboten en la superficie.
4. Sensores de proximidad
Los siguientes tipos de sensores, los de proximidad, consisten en transductores que detectan la presencia de objetos (obstáculos, personas…) sin necesidad de un contacto. En algunos casos también se pueden configurar para que midan la distancia.
5. Sensores de posición
Los sensores de posición nos permiten determinar qué ubicación tiene un determinado objeto. Como característica de los mismos, encontramos que generalmente disponen de un sistema electrónico particular, a fin de que puedan determinar la ubicación con la máxima precisión.
6. Sensores de color
Los sensores de color convierten la luz en frecuencia, a fin de poder detectar los colores de determinados objetos a partir de su radiación reflejada; lo que hacen es comparar estas radiaciones con los valores de referencia guardados.
Estos tipos de sensores emiten tres tipos de luz: roja, verde y azul, y lo hacen sobre los objetos que pretenden analizar. Finalmente, estos dispositivos generan una señal de salida (una respuesta).
7. Sensores de la humedad
Los sensores de humedad captan las señales del ambiente para detectar estos parámetros (humedad y temperatura). Además, el margen de error que tienen suele ser muy pequeño.
Por otro lado, a modo de ejemplo, este tipo de sensores se pueden aplicar para detectar el nivel de líquido en un depósito; también se utilizan en sistemas de riego de jardines, con el objetivo de determinar cuándo las plantas necesitan riego y cuándo no.
8. Sensores de velocidad
También conocidos como “velocímetros”, los sensores de velocidad permiten detectar la velocidad de un objeto (generalmente un vehículo).
Un ejemplo de ellos son los radares, que detectan si un vehículo iba a una velocidad superior a la permitida.
9. Sensores de sonido
Los siguientes tipos de sensores son los de sonido; se encargan de captar los sonidos del exterior (ambiente), a través de un micrófono o de un sistema de sonar.
Las ondas de sonido que reciben estos sensores se propagan por el aire del medio y después son detectadas por los sensores.
Se utilizan normalmente para recibir estímulos del exterior en forma de órdenes (provenientes de personas), de forma remota.
10. Sensores de contacto
Los sensores de contacto tienen la finalidad de detectar el final del recorrido de componentes mecánicos (o en otras palabras, su posición límite). Un ejemplo de ellos son: puertas que se abren de forma automática, que cuando ya están completamente abiertas, el motor que las acciona “sabe” que debe detenerse.
11. Sensores ópticos
En este caso, estos tipos de sensores permiten detectar la presencia de un objeto (o de una persona) que interrumpe un haz de luz que llega hasta el sensor.
Un ejemplo de ellos (y los principales) son las llamadas “fotorresistencias” (también denominadas LDR). Las LDR se utilizan especialmente en robótica, con el objetivo de regular el movimiento de los robots y de detener su movimiento en el momento en el que estén a punto de tropezar con algún otro objeto.
12. Sensores magnéticos
Los sensores magnéticos actúan detectando los campos magnéticos que provocan las corrientes eléctricas o los imanes.
Un ejemplo de estos tipos de sensores es el interruptor Reed, que consiste en dos láminas metálicas introducidas en el interior de una cápsula; dichas láminas están en presencia de un campo magnético, y se atraen entre ellas (es decir, cierran el circuito).
10. Bluetooth:
En este tutorial construiremos un robot móvil controlado por Bluetooth desde nuestro celular o smartphone a través de un aplicativo Android.
1. Materiales:
Empecemos describiendo los principales materiales:
Arduino
Podemos usar cualquiera de las placas Arduino, nosotros usaremos el Arduino Uno R3 por ser uno de los más usados.
Módulo Bluetooth HC-06 o HC-05
Este módulo nos sirve para que nuestro Arduino y el celular puedan comunicarse a través de Bluetooth. Para esta aplicación podemos usar cualquiera de los dos módulos pues los trabajaremos en modo esclavo.
Si usan un HC-06 estaría listo para usar, si usan un HC-05 deben verificar que esté configurado como esclavo. La velocidad con la que vamos a trabajar es a 9600baudios, que es la velocidad que viene por defecto tanto en el HC-06 como en el HC-05.

Nosotros usaremos el HC-06 con su configuración por defecto, si desean realizar configuraciones adicionales puede consultar nuestros tutoriales:
1. Configuración del módulo Bluetooth HC-06 usando comandos AT
2. Configuración del módulo Bluetooth HC-05 usando comandos AT
Driver Puente H
El puente H es el que nos permite invertir el giro de un motor, necesitamos un puente H que tenga dos canales para poder controlar dos motores.


Entre los puente H más comunes tenemos ,Algunos módulos aparte de los pines para controlar la dirección tienen un pin (Enable ) por donde podemos enviar PWM y controlar la velocidad, pero para este tutorial podemos usar cualquiera pues solo controlaremos dirección.
Motores con Llanta:
Básicamente 2 motores DC con caja reductora y su respectiva llanta, una velocidad promedio puede ser 100RPM, pero dependerá de la velocidad que uno desee.


El voltaje dependerá de la batería, por ejemplo si tienen una batería de 6V o de 3.7V se puede trabajar con el motor amarillo, si tienen una batería de 12V o 9V pueden trabajar con los micro motores, Si alimentamos un motor con un voltaje inferior al nominal, su velocidad disminuye, en cambio sí alimentamos con un voltaje superior podemos malograr el motor, por eso debemos de tener en cuenta las especificaciones técnicas del motor.
Batería
Esto tal vez sea lo más difícil de establecer, lo primero que hay que tener en cuenta es el voltaje. Arduino trabaja con un voltaje entre 6 y 12V, aparte de esto hay que tener en cuenta el voltaje del motor. También hay que considerar la corriente y la capacidad, por ejemplo si usamos una pila económica de 9V nos durará menos de un minuto, se recomienda que la capacidad sea superior a 500mAH
A continuación mostramos las opciones que pueden usar dependiendo del motor que tengan:
Motor de 6V:
Opción 1: 4 pilas AA para los motores y una de 9V para el Arduino
Opción 2: 1 celda de litio (batería de celular) para los motores y una pila de 9V para el Arduino
Opción 2: Cualquier batería superior a 6V (de suficiente corriente) y un step down para bajar el voltaje.
Motor de 12V:
Opción 1: Pila duracell 9V
Opción 2: batería lipo o litio de 2 o 3 celdas.
Opción 3: cualquier Batería de 12V (de suficiente corriente)
Opción 4: 1 celda de litio (batería de celular) o batería de 3.7V y un step Up para aumentar el voltaje.
Independiente del valor del voltaje de la batería podemos usar conversores DC-DC para aumentar (step up) o reducir (step down) el voltaje.
Chasis y rueda loca
Esto dependerá del diseño de cada uno, pueden hacerlo, o comprar uno hecho. El chasis básicamente es en donde se va a poner los dos motores con llanta y los demás componentes, adicionalmente se necesita una rueda giratoria o una ballcaster, que será el tercer punto de apoyo junto a las otras dos llantas.

Otros accesorios:
Adicionalmente podemos necesitamos un protoboard, cables DuPont Macho-Macho y Hembra-Macho y cablecillo para soldar los motores.
2. Ensamblando la parte mecánica de nuestro Robot Móvil:
Existen varios diseños en internet que nos pueden ayudar, así como existen plataformas comerciales. Esto dependerá de cada uno,
Para nuestro tutorial usaremos la locomoción diferencial, que utiliza dos ruedas principales que dan la tracción y por diferencia de velocidad en estas podremos realizar giros. Usaremos esta configuración por ser fácil de implantar, a diferencia de la configuración Ackerman (la que usan los vehículo motorizados) que es más complicado de implementar la parte mecánica.
La principal diferencia entre estas dos configuraciones es en el giro del robot, en la configuración diferencial tenemos que invertir el giro en uno de los motores o simplemente disminuir la velocidad, en cambio en la configuración Ackerman necesitamos de un servomotor para girar las llantas delanteras.

Como indicamos nosotros vamos a trabajar en la configuración diferencial y adicionalmente a las dos llantas principales necesitamos una o dos ruedas giratorias que nos servirán de apoyo, esta rueda lo podemos poner adelante y/o atrás.

3. Conexiones eléctricas:
A continuación mostramos dos posibles conexiones dependiendo del tipo de motor que tengan.
3.1 Para motores DC de 3-6VDC
Para este caso si necesitamos usar una sola batería, es mejor usar un step down y no alimentar los motores con los 5V del Arduino, pues sobrecalentaríamos el regulador interno que tiene.
La betería tiene que ser superior a 6V para que pueda trabajar nuestro Arduino pero se recomienda que tampoco sea superior a los 12V, adicionalmente la batería debe tener suficiente corriente para que pueda alimentar los dos motores, de lo contrario nuestro Arduino se va a estar reseteando cuando empiecen a funcionar los motores.

Antes de instalar el step down hay que regular al voltaje que deseamos, puede ser 6v, 5V, 3v, etc, variando este voltaje también estamos modificando la velocidad de los motores.
3.2 Para motores DC de 12V DC

De esta forma el voltaje que ingresa a los motores es el mismo que el de la batería.
Dependiendo del tipo de motor puedes usar la batería que más se adecue a tu necesidad, teniendo en cuenta que tenga la suficiente corriente y duración.
No hay comentarios:
Publicar un comentario